


伺服 Servo 这个词来自拉丁文 “servus”,意思是仆人按照主人的指示行事,并且忠实而快速地工作。
而 Servo 作为一个技术名词,我比较认同的定义大致是这样的:
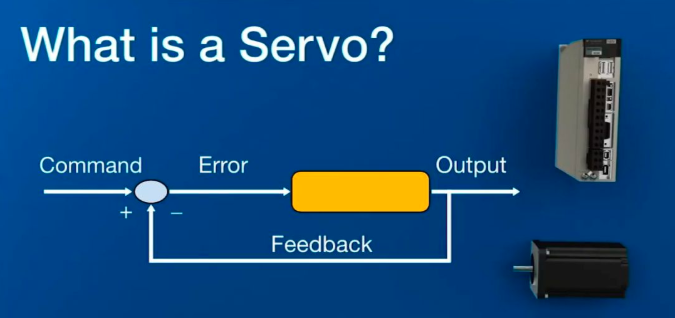
a device used to provide control of a desired operation through the use of feedback
通过使用反馈来为所需的运行操作提供控制的设备装置
从上面这段描述中我们可以看到,伺服首先是一种控制装置,需要有指令输入和动力输出。
由于需要对运行动作进行控制,其输出的就应该是机械动力。因此,伺服其实本质上是一种用于运动控制的动力传动技术。如果按照所使用的动力类型的不同,我们基本上可以把伺服分为:气动伺服、液压伺服、直流伺服和变频伺服...等。

伺服的输入为与运行动作需求相对应的一系列动态控制指令,如:速度、位置或转矩...等等。之所以说这些指令是动态的,是因为在实际应用中,目标对象往往需要在运行过程中根据工艺要求不断改变其位置、速度、转矩...等动作状态。因此伺服产品往往需要有一个或多个实时控制信号输入端口,如:脉冲输入、模拟量输入或数字通讯输入...等,用于从上位控制器接收连续的运动控制指令。
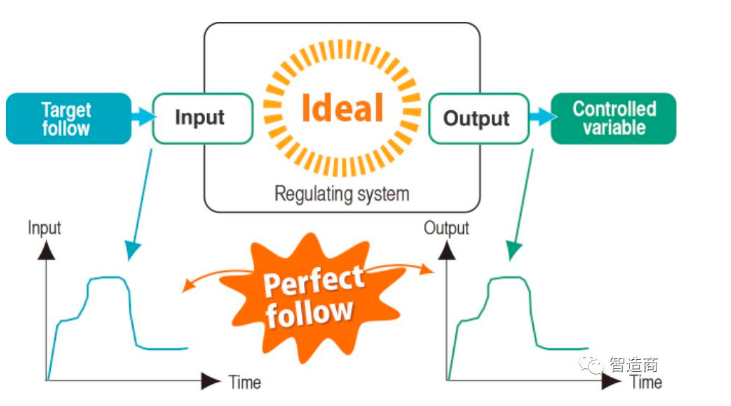
这些指令可能是控制器中已经规划好的运动曲线在各个时间点上的值,也有可能是基于其他运动轴状态实时计算出来的中间变量(如:主轴...),但不管怎样,伺服的任务就是要让其***终控制对象的动作轨迹尽可能的与给定的运行曲线相吻合。